FRAUNHOFER-INSTITUT FÜR KURZZEITDYNAMIK, ERNST-MACH-INSTITUT, EMI
FRAUNHOFER-INSTITUT FÜR KURZZEITDYNAMIK, ERNST-MACH-INSTITUT, EMIE-Scooter-Unfälle – Dummys und Menschmodelle im Einsatz
Untersuchung von Unfallparametern bei E-Scooter-Alleinunfällen mit teilweise überraschenden Ergebnissen

Die Fahrt mit einem E-Scooter ist nicht ungefährlich. Die Unfallstatistik 2021 des Statistischen Bundesamts hat gezeigt, dass fast die Hälfte aller Unfälle in Deutschland mit Personenschaden durch Alleinunfälle abgebildet wird. Grund genug, sich Unfälle dieser noch jungen Gruppe verletzungsgefährdeter Verkehrsteilnehmender (VRU) an einem konkreten Szenario genauer anzusehen.
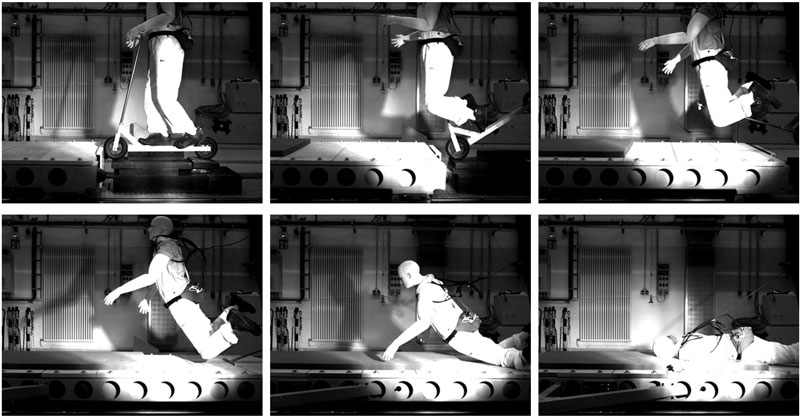
In einem gemeinsamen Forschungsprojekt mit dem Fraunhofer-Institut für Werkstoffmechanik IWM wurden am Fraunhofer-Institut für Kurzzeitdynamik, Ernst-Mach-Institut, EMI, Kollisionen von E-Scooter-Fahrenden mit Bordsteinkanten experimentell und simulativ nachgestellt. Besonderes Interesse galt dabei der Frage, ob bei Stürzen, die durch dieses spezielle Szenario entstehen, bestimmte Körperregionen gefährdet sind und ob und in welchem Maße man sich hierbei durch Protektoren schützen kann. Während sich die Kollegen am IWM primär auf werkstoffwissenschaftliche Themen rund um die in dieser Studie untersuchten Helme und Knieprotektoren konzentrierten, widmeten sich die Kollegen am EMI dem Einsatz des Fußgängerdummys PRIMUS in Experimenten am Crashzentrum der Fraunhofer-Gesellschaft und des Menschmodells THUMS in Simulationen in der Gruppe Human Body Dynamics. Gemeinsames Ziel war es, den Unfallvorgang selbst sowohl experimentell als auch numerisch nachstellen und bewerten zu können.
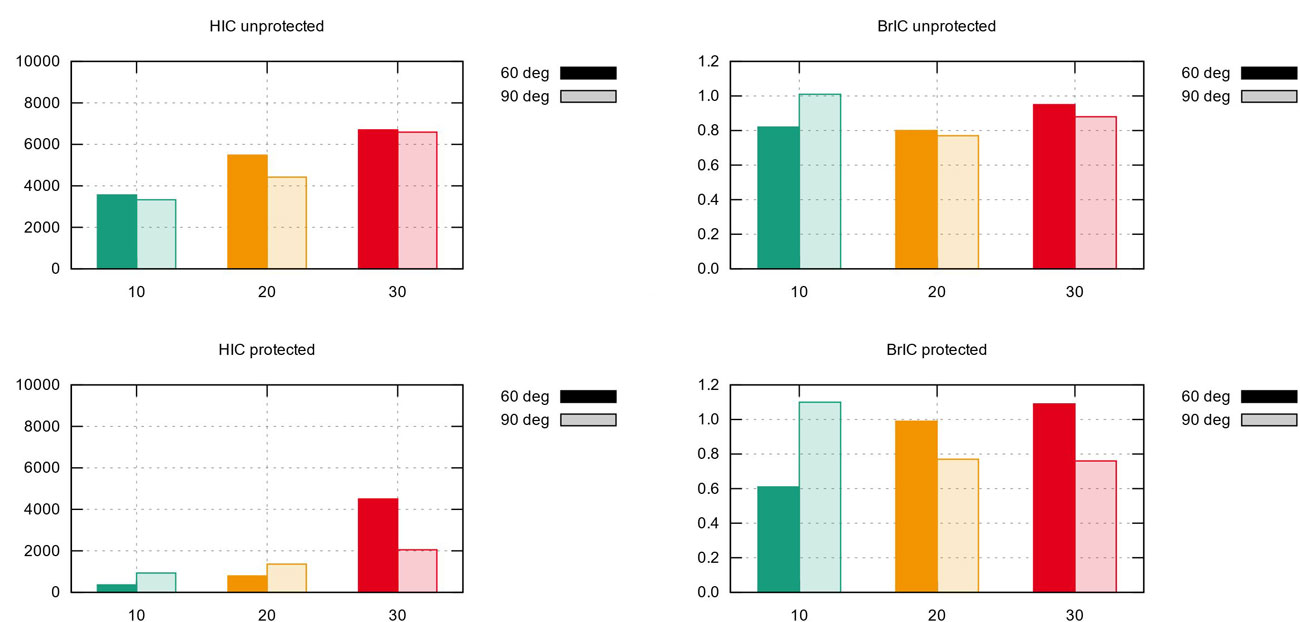
Testumfang und Simulationsmatrix
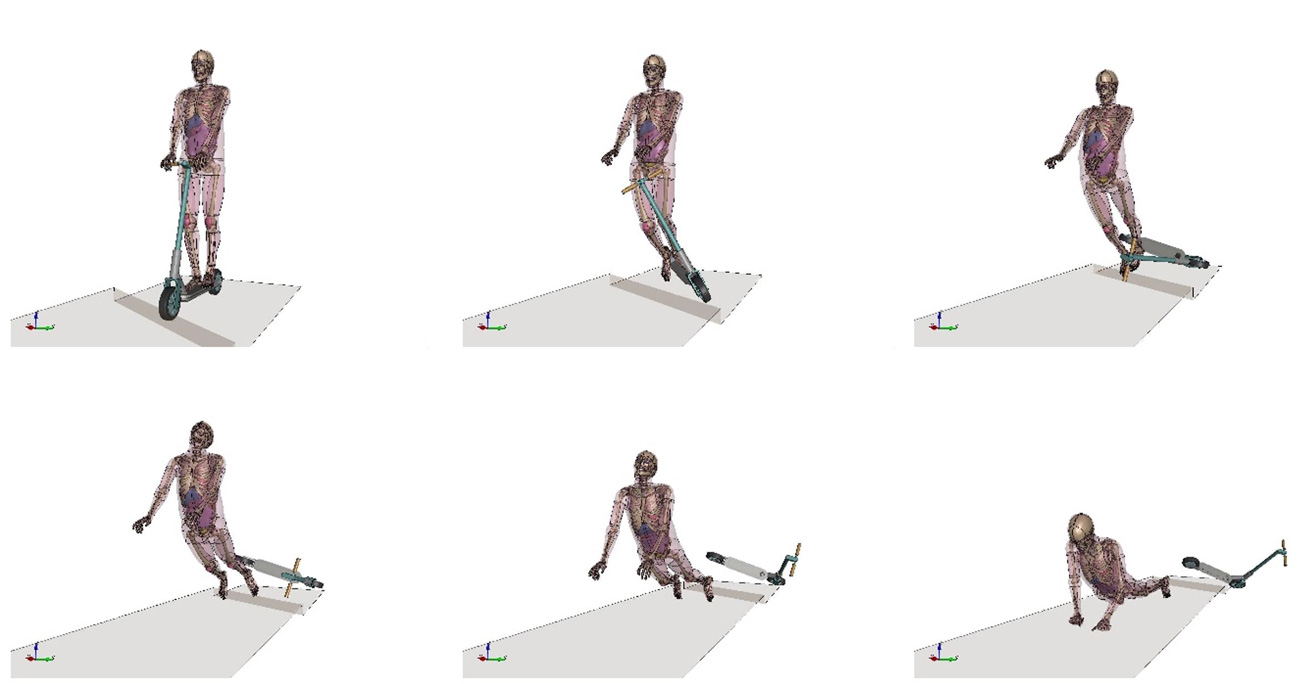
Für die Simulation des Unfalls wurden Teilmodelle für den E-Scooter, den Helm, die Knieprotektoren und die Bordsteinkante erstellt. Zentraler Bestandteil der Simulationen war jedoch der menschliche Fahrer selbst, dessen Körper ebenfalls über ein Teilmodell abgebildet wurde Das Menschmodell wurde in Vorabsimulationen mit Protektoren ausgestattet, in die richtige Körperhaltung bewegt und auf dem Scooter eingestanden, damit zum Zeitpunkt des Impakts die richtige Kontaktkraft zwischen E-Scooter und Fahrer wirkt. Die Crashstudie umfasste Kollisionsrechnungen bei unterschiedlichen Geschwindigkeiten (10, 20 und 30 Kilometer pro Stunde) und unterschiedlichen Aufprallwinkeln mit der Bordsteinkante (60 Grad und 90 Grad zur Fahrtrichtung). Wie im Experiment auch wurden in den Simulationen Beschleunigungsprofile im Inneren des Kopfs und im Inneren des Knies aufgezeichnet, die im Anschluss an die Berechnungen mithilfe verschiedener Verletzungskriterien ausgewertet wurden.
Kinematik des Sturzes
Der Sturz selbst lief in allen untersuchten Szenarien verhältnismäßig gleich ab. Bei einem Aufprallwinkel von 90 Grad zur Fahrtrichtung blockiert das Vorderrad des E-Scooters zwischen Bordsteinkante und Gefährt. Der E-Scooter wirkt aufgrund seiner Massenträgheit hier wie ein Hebel gegenüber dem Fahrer und katapultiert diesen je nach Konfiguration unterschiedlich stark in die Höhe. Bei einem Aufprallwinkel von 60 Grad tritt dieser Effekt weniger ausgeprägt auf. Hier rutscht das Vorderrad an der Bordsteinkante entlang, der Lenker verkantet seitlich und der Scooter klappt nach unten weg, was den Sturz für den Fahrer jedoch nur marginal glimpflicher ablaufen lässt. Die Dauer des Sturzes beträgt je nach Geschwindigkeit etwa zwischen einer halben und einer Dreiviertelsekunde, die Sturzweite zwischen zwei und fünf Metern.