FRAUNHOFER-INSTITUT FÜR KURZZEITDYNAMIK, ERNST-MACH-INSTITUT, EMI
FRAUNHOFER-INSTITUT FÜR KURZZEITDYNAMIK, ERNST-MACH-INSTITUT, EMIDie Fähigkeiten von Waffensystemen, die auf die Nutzung in dynamischen Einsatzszenarien ausgelegt sind, lassen sich in rein statischen Erprobungsszenarien nicht vollständig untersuchen.

Daraus ergibt sich der Bedarf nach einer Möglichkeit, Waffensysteme unter Aufrechterhaltung der Schießsicherheit auch in dynamischen Szenarien untersuchen zu können. Ein am Fraunhofer EMI entwickeltes Schießbereichsbegrenzungssystem überwacht die Position und Ausrichtung des Waffensystems. Mit diesem System kann die Freigabe zum Schießen automatisch auf zulässige Bereiche beschränkt werden.
Entwicklung einer elektronischen Schießbereichsbegrenzung
Im Rahmen einer Machbarkeitsuntersuchung mit dem Erprobungszentrum Unterlüß (EZU) der Rheinmetall Waffe Munition GmbH entwickelt das Fraunhofer EMI eine elektronische dynamische Schießbereichsbegrenzung, die als externes Anbaugerät an einem (hier beispielhaft ausgewählten) Kampfpanzer (KPZ) Leopard 2 adaptiert werden kann. Dabei wurde ein Funktionsillustrator entwickelt, der für eine Erprobung mit nur minimalem Systemeingriff über eine Standardschnittstelle am Fahrzeug montierbar ist und im Nachhinein wieder abgebaut werden kann.
Im Gegensatz zu klassischen mechanischen Bereichsbegrenzern handelt es sich um eine Multisensorplattform, die auch im Fahrbetrieb verwendbar ist. Das System misst mittels GNSS (Globalem Navigationssatellitensystem) seine aktuelle Position und mittels Inertialmesssystem seine Bewegung. Basierend auf den örtlichen Gegebenheiten des Erprobungsplatzes werden mittels einer GIS-gestützten Analyse (Geografisches Informationssystem) unter Einbeziehung der fusionierten Sensordaten in Echtzeit die zulässige Waffenausrichtung und Waffenposition bestimmt, in der ein Schuss ausgelöst werden darf. Je nach Munition, Fahrzeuggeschwindigkeit und Platzgegebenheiten sind die Präzisions- und Geschwindigkeitsanforderungen technisch herausfordernd. Hinzu kommt noch die Belastung durch den Schuss, gegen die das System gehärtet sein muss.
Echtzeitanalyse für sichere Waffenausrichtung
Es ergeben sich drei Hauptanforderungen: Messabweichung des Azimuts, Ausgangsdatenrate von Position und Orientierung und die Stoßfestigkeit des Systems.
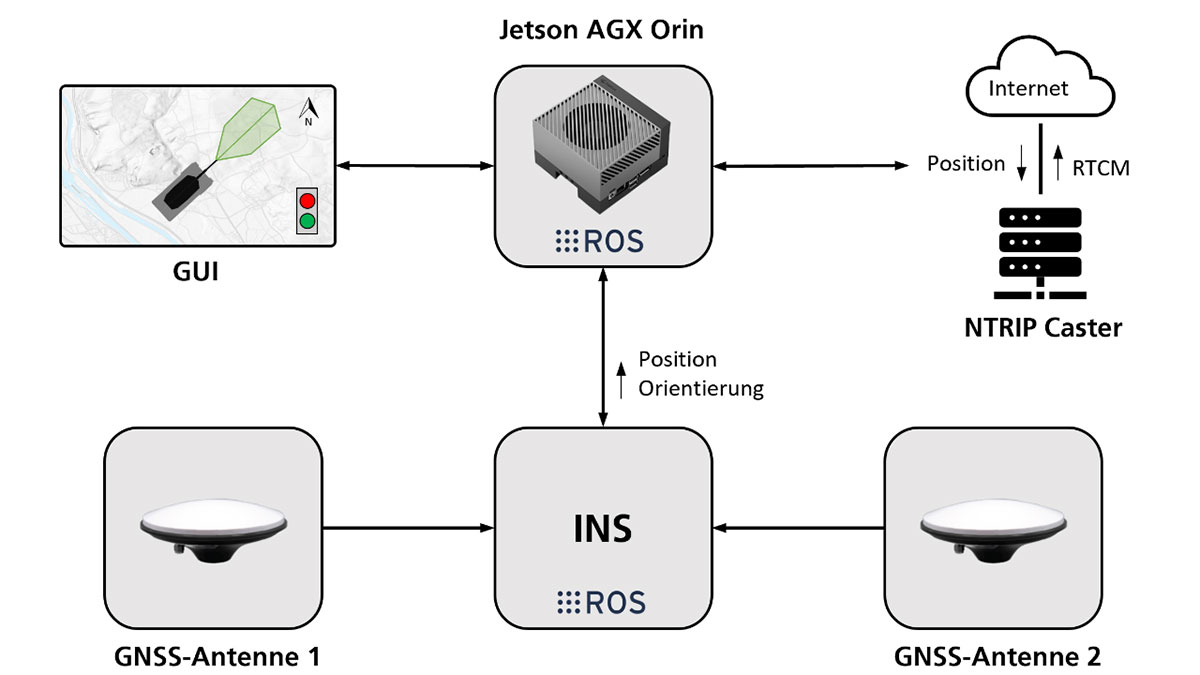
Um die absolute Ausrichtung der Bordkanone zu bestimmen, kommt ein satellitengestütztes inertiales Navigationssystem (INS) zum Einsatz. Das INS liefert kontinuierlich aktualisierte Informationen über die Fahrzeugausrichtung, während zwei GNSS-Multibandantennen dazu dienen, den Azimut zu korrigieren. Dabei ist es möglich, durch Echzeitkinematik (real-time kinematics, RTK) die Antennenpositionen in einem Bereich zwischen 1 cm und 2 cm anzugeben.