Fraunhofer Institute for High-Speed Dynamics, Ernst-Mach-Institut, EMI
Fraunhofer Institute for High-Speed Dynamics, Ernst-Mach-Institut, EMIValidated simulation models give a deep insight into possible collisions of airplanes and helicopters with drones.
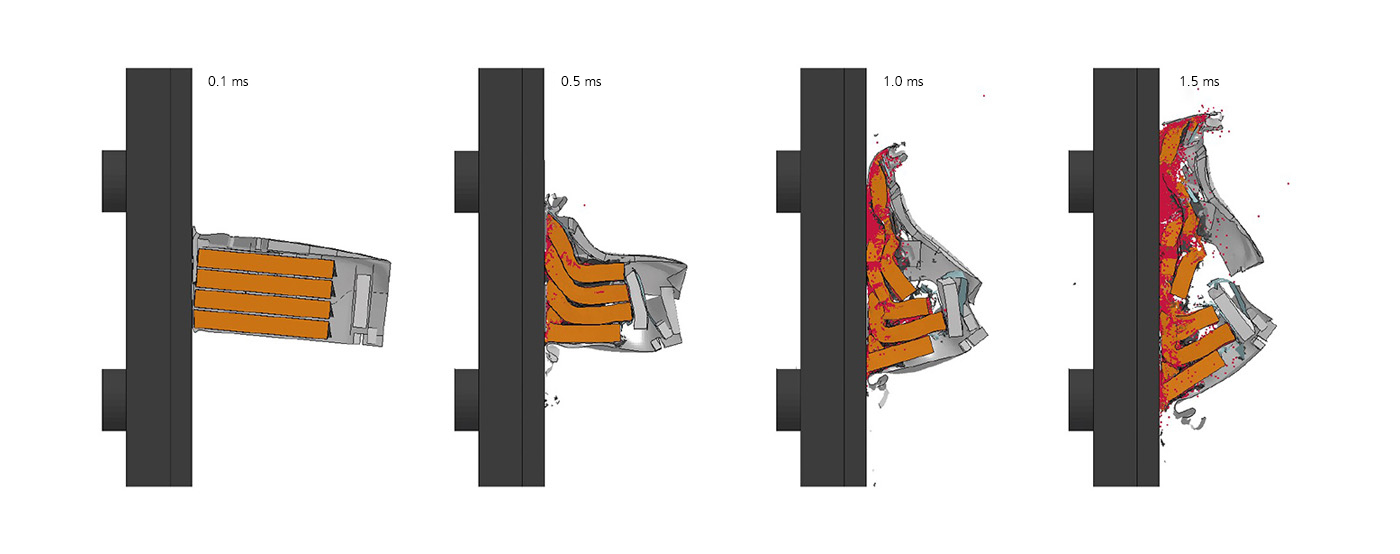
With the increasing availability of drones to a wider public, the probability of a collision with an airplane or a helicopter increases. A comprehensive understanding of the impact event is therefore an essential requirement to simulate and assess possible collisions.
Currently, there are more than 400,000 drones in Germany, most of them are privately used. In fact, a license is needed to pilot a drone having more than 250 grams, a collision with an aircraft cannot be excluded in any case. Thus, it is of large scientific interest to assess the response of aerostructures during a collision with a drone. Relevant collision scenarios are aligned to typical take-off and landing velocities of airplanes and on cruise speeds of helicopters. The speed range is therefore roughly between 50 and 150 meters per second. In SMAUG — Simulation Methods to Analyze Collisions between Drones and Aircraft — simulation models for respective collision scenarios were developed. The project was financed by the Federal Ministry for Economic Affairs and Climate Action (BMWK) within the aviation research program LuFo VI.
Selection of the drone
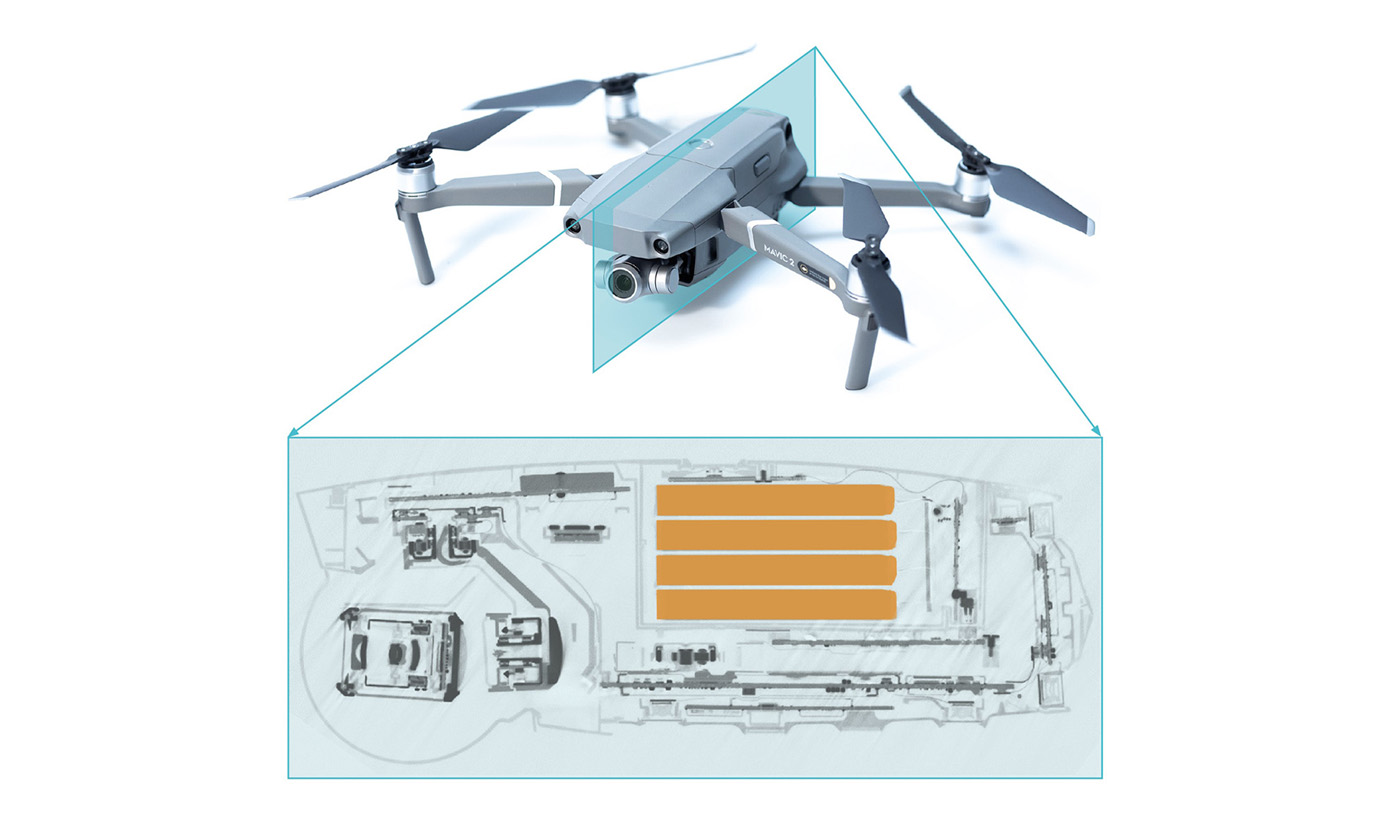
Experimental and numerical investigations in SMAUG were conducted on the popular quadcopter DJI Mavic 2 Zoom. Besides the wide distribution, its mass of 907 grams (which corresponds to two pounds) was one selection criterion. So, by selecting this drone, an analogy with the certification specifications for small commuter aircraft regarding bird strike could be drawn, since in these requirements a bird mass of two pounds is taken as reference. The selected drone consists of four arms, to where electric motors and rotors are attached, as well as a fuselage that contains a camera and a battery. First experimental investigations on the components motor, camera and battery showed that the motors, but especially the battery are a potential risk. The battery is of special interest due to its compact, however very complex construction, and its comparatively high mass of 292 grams.